详情
本书以地下或水下隐蔽磁性目标探测为背景,以磁通门传感器搭建的磁梯度张量系统为基础,通过理论推导、仿真分析和实验验证,重点介绍磁梯度张量系统结构分析与搭建、误差分析与校正、磁干扰补偿与降噪,以及磁性目标定位、模式识别等方面,为高精度目标探测仪器的研制与应用提供理论指导和技术支撑。
本书适合磁性目标探测相关专业的研究生及相关行业的从业者阅读。
书名:磁梯度张量系统构建及目标探测技术
ISBN:978-7-115-62919-7
本书由人民邮电出版社发行数字版。版权所有,侵权必究。
您购买的人民邮电出版社电子书仅供您个人使用,未经授权,不得以任何方式复制和传播本书内容。
我们愿意相信读者具有这样的良知和觉悟,与我们共同保护知识产权。
如果购买者有侵权行为,我们可能对该用户实施包括但不限于关闭该帐号等维权措施,并可能追究法律责任。
著 李志宁 范红波 李青竹 王怀光
责任编辑 邓昱洲
人民邮电出版社出版发行 北京市丰台区成寿寺路11号
邮编 100164 电子邮件 315@ptpress.com.cn
网址 http://www.ptpress.com.cn
读者服务热线:(010)81055410
反盗版热线:(010)81055315
本书以地下或水下隐蔽磁性目标探测为背景,以磁通门传感器搭建的磁梯度张量系统为基础,重点介绍磁梯度张量系统结构分析与搭建、误差分析与校正、磁干扰补偿与降噪,以及磁性目标定位、模式识别等方面内容,为高精度目标探测仪器的研制与应用提供理论指导和技术支撑。
本书既有理论推导,又有仿真分析和实验验证,适合磁性目标探测相关专业的研究生及相关行业的从业者阅读。
隐蔽目标的探测与识别是海洋反潜、未爆弹排除、地下管道探查等领域的核心问题。由于磁场受水、土壤、岩石和空气等介质干扰较小,相比其他方法,磁探测法具有非主动、不受气象影响、隐蔽性好的优势,对磁性隐蔽目标进行探测具有很强的针对性。磁性目标全张量探测技术以目标产生的磁梯度张量异常场为信息源头,可获得比磁总场及其梯度探测技术更多的信息量和更高的目标分辨率,在隐蔽目标的探测方面具有重要的应用价值,成为磁探测技术领域的研究热点。但目前对磁梯度张量法的研究仍处于初级阶段,在磁梯度张量系统构建、数据处理、反演计算技术方面依然缺乏深入的理论分析和实验研究。
本书是论述隐蔽磁性目标探测的新理论、新方法、新经验的专著,是作者多年理论研究和实践工作的总结。本书对磁梯度张量系统设计、系统误差校正和磁干扰补偿、磁性目标定位和反演、磁性目标分类与识别等关键技术进行了研究,建立了基于磁梯度张量的隐蔽目标探测与识别关键技术的研究体系,形成和完善了以磁梯度张量系统搭建、测量和数据解释为一体的理论和方法。在此基础上,利用磁梯度张量探测设备开展研究,解决了磁梯度张量系统结构优化和参数选择、磁梯度张量系统理论探测极限估计、磁测信号的独立变分模态分解降噪、利用张量空间不变关系的磁源定位、基于磁梯度张量赫尔比格积分的目标多源定位、航线测量条件下的磁性目标模式识别等关键问题,提供了以磁通门阵列搭建磁梯度张量系统进行测量和数据解释的新思路和新方法,具有重要的科学意义和工程应用价值。
本书特点鲜明,风格别具。第一是具有创新性,书中力求将磁张量、信号处理、模式识别理论与方法相结合用于磁性目标探测,探索并构建了一套基于磁梯度张量系统的目标探测关键技术路线和研究体系,提出了对该领域的后续研究发展思路和未来技术突破方向的见解,有其独到之处。第二是具有实践性,书中既有理论推导,仿真计算,也有实验验证,所述的理论和方法都是经过实验验证的,成果均发表于国内外该领域主要期刊,得到了同行专家的高度认可。因此,这一专著对于从事磁性目标探测领域的技术人员具有重要的参考价值,定会开卷有益。
中国工程院院士 
磁梯度张量系统以区域磁异常产生的磁梯度张量场为信息源,通过计算矢量磁传感器间的差分值实现磁梯度张量场的测量,是磁性目标全张量梯度探测的应用基础。相较于磁总场和矢量场探测设备,磁梯度张量系统具有分辨率高、信息量大、抗干扰能力强等优势,能获取目标更多的潜在物性信息,是目标探测领域的关键技术。本书介绍磁梯度张量系统的搭建、校准、评估,以及基于该系统的磁性目标定位、反演和识别等关键技术及应用。各章内容简介如下。
第1章介绍研究背景、意义,以及相关领域的研究现状,包括磁探测技术、磁梯度张量系统设计原理和传感器选择、磁梯度张量系统设计和搭建等。
第2章介绍磁梯度张量系统测量基础,阐述磁梯度张量测量基本原理;介绍磁梯度张量系统结构分析与搭建;通过推导差分磁梯度张量测量范围公式,给出磁梯度张量系统理论探测极限。
第3章介绍磁梯度张量系统精度提升方法,分析磁梯度张量系统误差,并介绍线性和非线性误差校正方法;介绍磁梯度张量系统的ICRA校准方法和IVMD降噪方法等。
第4章介绍航线测量下的单磁性目标定位方法,包括张量空间不变关系磁源定位方法和三阶磁梯度张量欧拉反褶积磁源定位方法,还介绍了目标定位性能测试,并分析影响因素,最后介绍两个航线测量下的磁性目标定位实验。
第5章介绍网格测量下的多磁性目标定位方法,描述了磁梯度张量系统网格测量过程,分别介绍了用于多磁源目标定位的AFCM聚类算法和磁梯度张量赫尔比格积分方法,最后介绍两个网格测量下的多磁性目标定位实验。
第6章介绍航线测量下的磁性目标模式识别方法。以磁梯度张量系统的航线测量过程为切入点,介绍了磁梯度张量航线测量信号特征提取方法和信号模式识别方法,最后介绍航线测量下的磁性目标典型特征识别实验。
现代战争中,对信息的掌握程度决定了战争双方的主动权和话语权,特别是针对军事目标信息的高效获取和准确识别至关重要。军事隐蔽目标,如地雷、水雷、未爆弹、潜艇和掩蔽发射井等,具有伪装能力强、特征敏感度低、可观测性弱等特点,使得目标探测难度和不确定性陡然增加,对这些目标信息的获取和处理面临巨大挑战。随着武器装备的智能化、信息化改造和更新的需求日益增长,如何有效利用技术手段实现战场、靶场或其他军事应用场景中的军事隐蔽目标探测是当前亟待解决的问题。针对隐蔽目标的探测技术可分为主动探测和被动探测两类。主动探测,多运用有源声呐、电磁波雷达等技术[1-2]对目标进行声波或电磁波探照扫描,通过分析接收器得到的回波信号来测定目标,探测灵敏而精准,抗干扰能力强,但其致命缺点是主动探测使己方暴露、警报误触和引爆弹药等不确定风险陡然升高。被动探测,常通过搜集目标周围场源(磁场、力场或电场)信息,或侦测捕捉目标辐射源(自身辐射或外源反射)进行目标探测,如运用被动声呐、无源雷达、远红外扫描、重力场测量和磁探测等技术[3-5]。被动探测属于无源探测,隐蔽性能好,信息获取量大,不易被敌方感知或触发警报,更能适应未来新型战场环境。因此,本书以隐蔽目标探测为背景需求,研究基于场源测量仪器的目标被动探测技术和方法。
军事隐蔽目标的主体多为铁磁性金属材质,经过轧制、锻造和焊接等制作工序时会产生局部磁性金属集中的剩余磁化强度。同时,在地磁场的磁化作用下,这些磁性金属又将产生局部感应磁化强度,剩余磁化强度和感应磁化强度的相互叠加使目标具备磁异常属性[6-7]。因此,利用磁探测技术探查铁磁性军事隐蔽目标具有很强的针对性,且磁场几乎不受水、土壤、岩石和空气等介质干扰,适用于很多海陆空天立体作战场景。例如,在航用方面,将磁测设备捷联于飞机或航行器上进行航测,适用于航弹搜索、丛林伪装部队发现、隐蔽工事识别、山地掩蔽导弹发射井探测等;在陆用方面,研发单兵手持式磁测设备或捷联于战车、地面无人平台、低空无人机等的磁测仪器,可用于地下未爆弹、地雷、陷阱、飞行事故记录器、地下防御工事和隐蔽武器等的探测,特别是地下未爆弹作为战场或靶场遗留物将严重威胁人员生命安全和生态环境,延误军事活动和作战进度[5,8-9];在海用方面,磁探测依然是搜索水下典型军事目标、精确定位的重要手段,且目前的新型反潜飞机或战舰几乎都配装了捷联式磁测系统,用于浅水猎雷、探潜和反潜、水下未爆弹排除、海底管道检测等。此外,磁探测技术还具有数据解析潜力大、隐蔽性能好、探测精度高、虚警率低、执行速度快、气象依赖程度低等优势[7],现已成为各国军事和民用科技领域的研究热点。因此,研究先进的磁场测量手段和磁场数据解释技术、研制新型磁测仪器和配套目标探测方法迫在眉睫,使磁测仪器的测量范围更广、目标定位更精确可靠、目标识别更快速准确[10],对国家国防和科研实力提升具有重要价值和战略意义。
现代磁探测技术发展主要以提高磁场可测量参数的阶次来扩展磁测仪器的功能,从而提升数据解释潜力。表1-1记录了磁探测技术发展的4个阶段,包含磁总场阶段、磁总场梯度阶段、磁矢量场阶段,以及当前正在攻坚的磁梯度张量阶段[11-12]。其中,磁梯度张量为磁场矢量沿正交分量方向上的三维变化率,仅二阶磁梯度张量矩阵即可提供9个磁张量分量,相较于表1-1中前3个阶段的测量参数,磁梯度张量优势明显[13-14]:①对仪器系统的测量方向敏感程度极低,测量结果受系统姿态变换的影响较小;②由于地磁场通常较稳定且磁场主分量梯度一般较小,磁梯度张量可以滤除大部分均匀强度的背景磁场,故其受环境磁场影响也较小;③能提供更丰富的地磁异常和磁场空间域变化信息。21世纪以来,磁梯度张量测量技术及其数据解释方法研究已逐渐成为世界各国研究的重点,更被认为是磁法勘探领域的突破[15]。磁梯度张量测量技术不仅可应用于军事领域,在矿藏勘探、地磁导航、地下或深海管网检测、重大自然灾害监测、空间探测等领域同样具有重要价值[16]。
表1-1 磁探测技术发展阶段、测量参数阶次和范围、仪器类型和功能[12]
| 发展阶段 |
测量参数阶次 |
测量参数范围 |
仪器类型 |
仪器功能 |
|---|---|---|---|---|
| 一 |
标量 |
磁总场 |
磁总场传感器 |
探测有无 |
| 二 |
标量梯度 |
磁总场、磁总场梯度 |
磁总场梯度仪 |
探测有无、定向、跟踪 |
| 三 |
矢量(一阶张量)、 |
磁总场、磁总场梯度、矢量场、矢量场梯度 |
磁矢量传感器、 |
探测有无、定向、跟踪、粗略定位 |
| 四 |
磁梯度张量(二阶或高阶张量) |
磁梯度张量、前3个发展阶段的全部参数 |
磁梯度张量系统 |
探测有无、定向、跟踪、精确定位、反演、识别 |
随着研究人员不断发现物理现象与物理效应,一大批原理各异、分辨率不等(10 nT~5 fT)的磁传感器相继被研发出来[17],表1-2中总结了目前市面上主流磁传感器的部分指标。其中,性能较为突出的有磁阻(巨磁阻抗)传感器、质子磁强计、光泵传感器、相干布居囚禁(Coherent Population Trapping, CPT)磁力仪、超导量子干涉器件(Superconducting Quantum Interference Device, SQUID)和磁通门传感器等。随着制造水平和加工工艺的改进,磁传感器测量精度和范围仍在不断更新优化。这些传感器中,质子磁强计、光泵传感器、CPT磁力仪、单轴SQUID仅用于磁总场或单轴磁场的测量,称为标量磁力仪;而磁通门传感器三轴式SQUID阵列既可测量标量,也可测量磁场矢量,被称为磁矢量传感器,或三轴磁强计。由于磁梯度张量需要在磁场矢量的正交方向进行偏微分求导计算,磁总场信号无法实现磁张量场转换,故传统标量磁力仪不适用于测量磁梯度张量。多个磁矢量传感器利用正交阵列结构进行同步数据采集,可为磁张量的差分测量提供途径。
表1-2 市面上主流磁传感器的部分指标[17]
| 传感器类型 |
分辨率 |
测量范围 |
响应频率 |
|---|---|---|---|
| 磁感应线圈 |
100 fT |
±104 T |
0.1 mHz~1 MHz |
| 霍尔传感器 |
10 nT |
±20 T |
0~100 MHz |
| 磁阻传感器 |
100 pT |
0~100 mT |
0~100 MHz |
| 磁电传感器 |
1 pT |
±∞ |
0.1 mHz~1 kHz |
| 质子磁强计 |
0.1 nT |
20~100 μT |
0~10 Hz |
| 光泵传感器 |
0.1 pT |
2 μT~1 mT |
0~10 kHz |
| CPT磁力仪 |
1 pT |
0~1 mT |
0~100 kHz |
| SQUID |
5 fT |
±0.1 mT |
0~100 MHz |
| 磁通门传感器 |
10 pT |
±1 mT |
0~100 kHz |
测量磁梯度张量的仪器称为磁梯度张量系统[18]。区别于常规磁传感器或磁测仪器,磁梯度张量系统多由数个磁矢量传感器的阵列组合搭建而成,目前主要发展为两类:一类是由SQUID组成的磁梯度张量系统[19-20],另一类是由磁通门传感器组成的磁梯度张量系统[21-22]。SQUID是目前磁测领域分辨率最高的仪器[14],关于超导效应的磁梯度张量系统,国外和国内的研究机构都进行了大量的相关研究[20, 23-26]。SQUID的灵敏度极高,但其量程却较小,适用于航行器拖曳探测磁异信号极其微弱的目标,如山脉矿藏、水文地质等。由于磁梯度张量系统的SQUID探头需要严格控制温度,以提供约瑟夫森效应所要求的工作温度,工作条件较为苛刻,系统安装工艺与测量环境要求严格,设备体积庞大,降温和辅助装置价格高昂,不利于量产,因此并不适用于复杂的小尺度目标探测,如水下、地面的隐蔽磁性目标或地下未爆弹等小型军事目标的测量。
相比之下,磁通门传感器基于变压器效应研制,具有稳定性好、温度要求宽泛、复杂环境适应性强、应用范围广、制造成本低、精度保持性好等特点。由多个磁通门传感器构成的磁梯度张量系统具有价格低廉、适配性好、结构简单、测量稳定等特点[27-28]。目前,磁通门传感器探头的研制规模和生产工艺已趋于成熟,其测量分辨率和量程已完全满足现阶段战场目标定位与识别需求,非常适合用于战车或航行器的捷联磁测设备的搭建和备装。因此,本书主要以磁通门式磁梯度张量系统为对象开展研究。
磁梯度张量系统及其目标探测关键技术涉及一系列研究热点与突破,包括磁梯度张量测量仪器或系统的设计和搭建、磁梯度张量测量方法的优化和改进、磁梯度张量测量性能估计和评价、磁梯度张量系统校正和磁干扰补偿、磁性目标定位跟踪和反演、磁性目标分类和识别等。目前德国[29-31]、美国[32-34]、澳大利亚[35-38]等国早已开展了磁梯度张量系统的研制工作,并进行了大量的野外试验,取得了巨大的进展,部分测量系统已实现商业化。不仅如此,美国海军在21世纪初期就开始进行军用磁梯度张量探测仪器的研发工作,并已经用于浅水海域猎雷、未爆弹探测和水下目标跟踪等军事应用[39-42]。我国对磁梯度张量系统的理论研究、数据处理和解释工作尚处于起步阶段,在磁梯度张量系统目标探测关键技术上还未形成研究体系。因此,如何设计搭建磁梯度张量系统,如何校调系统参数和校正误差,执行何种系统测量和数据采集方式,如何评估系统探测性能并提高测量极限和可靠性,如何解释数据以提升目标定位、反演和识别精度,是亟待解决的问题。
综上所述,进行磁梯度张量系统的结构设计、搭建策略和探测极限研究,开展磁梯度张量系统的误差校正、磁干扰补偿和降噪方法研究,以及深入研究基于系统航线测量和网格测量的目标定位、反演和识别等数据解释方法,具有重要理论参考与实用价值,对现代磁探测技术发展和装备信息化建设具有重大战略意义。具体解决如下问题。
(1)磁梯度张量系统磁通门结构设计与系统搭建问题
正确和高效采集磁梯度张量信号是探测目标和解释数据的前提。磁梯度张量本质上是磁标势的高阶偏导数,无法直接测量,但可利用阵列结构中的传感器正交分量读数在基线距离上的空间变化率近似估计磁梯度张量的分量,然而该过程会引入与基线距离和结构配置相关的结构误差。目前国内外团队相继设计研发了正方形、十字形、三角形、直角四面体、正四面体等结构的磁通门张量系统,但不同结构的选择依据尚不明确,系统结构误差分析、结构参数选择策略及针对特定结构磁梯度张量系统探测极限的相关研究也鲜有报道。因此,设计优化系统结构和参数,实现既兼顾捷联安装便捷性和探测极限要求又尽量减小结构误差,以此提供磁梯度张量系统优选结构配置和理论探测极限估计方法,是提高系统性能和目标探测效率的基础。
(2)磁梯度张量系统输出校准问题
磁梯度张量系统输出的真实程度决定了解释磁张量数据的有效性和可靠性。考虑制造工艺和加工水平的限制,磁通门传感器存在系统误差,多个传感器组成的阵列间存在非对准误差,此外,系统的捷联载体和背景磁场环境中未知铁磁性成分的存在会导致磁干扰误差,并且处于外界电场环境中的信号采集设备会出现电磁干扰噪声等,在这些因素的综合作用下,系统的磁梯度张量信号输出将严重失真。因此,进行磁梯度张量系统的误差分析和干扰磁场源建模,提供磁梯度张量系统的误差校正方法、磁干扰补偿方法和磁测信号降噪方法,可进一步提高系统的目标探测精度。
(3)磁性目标定位问题
对磁梯度张量数据解释的关键在于对目标进行位置估算和磁矩反演,称为目标定位问题。如何快速准确计算目标位置和磁矩信息是目标定位的核心问题,而磁梯度张量系统航线测量与网格测量可分别为单目标实时定位、多目标同步定位提供数据支撑。对于单目标定位方法要求具有较好的实时性和单点定位准确性,且能有效提取淹没于庞大背景场中的磁异特征信息;对于多目标定位方法则要求同步获取场景内多个目标的水平分布坐标、埋深和磁矩信息,需要对多磁源磁场具备较好的场源分离辨识能力,尽量避免磁异常场的叠加造成定位准确性的丧失。因此,针对两种目标定位方法研究高效准确的适配算法,提供磁梯度张量系统航线测量下的单目标定位、反演和航线跟踪方法,以及网格测量下的多目标定位、反演和区域识别方法,是解决目标定位问题的有效手段。
(4)磁性目标分类识别问题
将磁梯度张量的测量过程进行信息转化,并使用机器学习辅助测量可实现磁性目标智能探测。传统目标识别方法大多归属磁异常反演计算范畴,识别过程中极易受到环境中磁干扰和测量仪器噪声的影响,识别精度往往受限。如何跳过庞大的解析计算过程,通过测量手段直接快速识别出目标类型和姿态等重要信息是解决目标分类识别问题的关键。常规网格测量方法普遍存在测量难度大、采集流程复杂、二维网格数据信息量不足等问题,为磁性目标模式识别的样本获取带来困难。航线测量方法操作便捷、采样信息丰富、信号空间连续性好、高采样率下的特征提取更为可靠,尤其适合为目标磁场模式识别提供训练数据支持和学习。因此,研究磁梯度张量系统航线测量下的目标信号特征提取方法和模式识别方法,是解决目标信息的快速获取和分类识别问题的重要途径。
磁探测技术研究伴随着磁传感器技术发展的不断更新进步,经历了磁总场阶段、磁总场梯度阶段、磁矢量场阶段和磁梯度张量阶段4个阶段(详见表1-1)。
磁总场探测技术最早出现,应用也最广,以找寻磁异常目标或遥感测绘为主要目的,已广泛应用于航磁导航、矿产搜索和探潜反潜等领域[43],目前较先进的磁总场传感器为光泵传感器,它的最佳分辨率和量程分别达到0.1 pT和1 mT。光泵传感器响应频率快、灵敏度高、功耗较低,且灵敏度几乎不受背景环境电磁干扰的影响,在国内外已广泛应用于军事领域。例如21世纪初期美国海军就装备了珀拉托密克公司为其研制的一款P-2000光泵磁力仪[44],并安装在反潜机P-3C上进行了航测试验,该磁力仪采用4He作为工作物质,动态灵敏度高于 @0.1 Hz,探测距离半径为1.5 km。2010年,美国海军将CAE公司研制的激光传感器捷联于波音737 改装的P-8A反潜巡逻机[45]。此外,美军公开招标磁测探潜仪器,要求探测距离达到2.7 km,反映出磁总场探测的重要性和技术成熟度。在世界范围内,以光泵磁力仪为主要设备的磁探测项目也屡见不鲜,许多国家相继开展了相关技术研究,特别是在靶场或战场未爆弹探测和排除等应用中取得了较大进展。我国在磁总场探测应用方面还处于理论研究和样机研制阶段,例如北京地质仪器厂与长春地质学院合作研制的氦光泵磁力仪CBG-1;中国船舶集团有限公司的氦光泵磁力仪RS-HGB4A航空型、RS-DGB4A地面型、RS-YGB6A 海洋型,以及RS-HGB10无人机型,量程范围为35~70 μT,静态分辨率高于0.01 nT[46];中国地质调查局自然资源航空物探遥感中心研制的 HC-95、HC-07氦光泵磁力仪传感器分辨率达50 pT[47];吉林大学研制的数字式氦光泵磁力仪原理样机JLUOPM-1,静态分辨率达到10 pT[48]。毫无疑问,光泵磁力仪在基于磁总场探测技术的隐蔽武器目标探测和军事航测等军事领域有极其广阔的发展前景,然而,技术成熟和稳定并不能弥补磁总场探测技术的先天不足,在对磁性目标进行深度反演解释时,磁总场探测技术存在瓶颈。
@0.1 Hz,探测距离半径为1.5 km。2010年,美国海军将CAE公司研制的激光传感器捷联于波音737 改装的P-8A反潜巡逻机[45]。此外,美军公开招标磁测探潜仪器,要求探测距离达到2.7 km,反映出磁总场探测的重要性和技术成熟度。在世界范围内,以光泵磁力仪为主要设备的磁探测项目也屡见不鲜,许多国家相继开展了相关技术研究,特别是在靶场或战场未爆弹探测和排除等应用中取得了较大进展。我国在磁总场探测应用方面还处于理论研究和样机研制阶段,例如北京地质仪器厂与长春地质学院合作研制的氦光泵磁力仪CBG-1;中国船舶集团有限公司的氦光泵磁力仪RS-HGB4A航空型、RS-DGB4A地面型、RS-YGB6A 海洋型,以及RS-HGB10无人机型,量程范围为35~70 μT,静态分辨率高于0.01 nT[46];中国地质调查局自然资源航空物探遥感中心研制的 HC-95、HC-07氦光泵磁力仪传感器分辨率达50 pT[47];吉林大学研制的数字式氦光泵磁力仪原理样机JLUOPM-1,静态分辨率达到10 pT[48]。毫无疑问,光泵磁力仪在基于磁总场探测技术的隐蔽武器目标探测和军事航测等军事领域有极其广阔的发展前景,然而,技术成熟和稳定并不能弥补磁总场探测技术的先天不足,在对磁性目标进行深度反演解释时,磁总场探测技术存在瓶颈。
磁总场梯度探测技术可以看作磁总场探测技术的延伸,主要测量磁总场及其梯度,该过程可以较好地消除测量信号中的地磁日变和庞大背景磁场的影响,相较单一的磁总场具备更多的信息、更高的场源分辨率,可一定程度描述近端磁性目标的磁场分布细节和空间变化规律[49]。国外最早于1965年着手磁总场垂向梯度的研究[50],并用于绘制点偶极子类目标的磁总场垂直梯度曲线和估计埋深,1988年出现了磁总场水平梯度测量的相关报道[51],现如今已在断层测绘、地质勘探、磁性矿体地图绘制和目标边缘增强等领域有较广泛的应用[52],如美国的Doll等人在2006年设计研制了0RAGS-VG磁垂向梯度仪[53],并搭载在直升机上进行1.5~2 m的近地飞行测量,探测地下未爆弹或其他金属物体,该仪器由8个磁总场探头构成;伊朗在2017年利用磁场水平梯度仪在某地区实施了航磁测量以实现地质断层的边缘检测[54]。我国在20世纪末相继报道了磁总场梯度仪器的相关研制工作[55],2011年我国“863计划”重大项目“航空地球物理勘查技术系统”团队研制了AGS-863航磁全轴梯度勘查系统[56],在进行了超过13000 km的航测试验后,验证了该系统关键性指标的稳定性和可靠性。此外,我国学者仍在积极研究基于磁总场梯度的目标探测技术,涵盖未爆弹探测、航磁导航、目标跟踪等多个领域并获得了一定成果[57-59]。
磁矢量场及其梯度探测技术随着高精度磁矢量传感器的发展而逐渐兴起,具备磁总场梯度探测的全部优势和功能。其中,以SQUID为主的磁矢量梯度仪发展快速,在21世纪初,国外相关团队已经开发了数套SQUID系统并成功地将磁探测技术向磁异检测、无损探伤和生物应用等方向拓展,例如,2002年德国吉森大学应用物理研究所的Kreutzbruck等人利用集成有轭磁铁励磁的SQUID阵列检测空客飞机舱壁缺陷[60];2007年德国联邦物理技术研究院开发了一种新型低噪声SQUID,具有更好的易用性、更低的噪声和更好的高动态表现[61];2006年美国加利福尼亚大学伯克利分校物理系的Michael等人利用SQUID检测包含钛棒的铝罐中物体的无失真三维图像,该方法避免了金属物体对核磁共振成像造成的影响,在核磁医学成像检测中有望获得突破[62]。我国SQUID和磁通门探头的矢量及梯度探测技术起步较晚但发展迅速,如2012年中国科学院物理研究所王宁团队利用高温SQUID进行了低场核磁共振成像的系统性探索[63];2021年中国科学技术大学王永教授团队对实用化的SQUID传感器电路分析方法和应用等技术开展了一系列研究,并成功应用于无屏蔽多通道心磁图仪系统和航空超导磁测系统[64]。与磁总场梯度探测系统相比,磁矢量场及其梯度探测系统不仅能更好地完成航空磁测、山脉勘探等宏观测量工程,在小尺度目标定位、金属探伤、生物磁场等微观场景中也表现出优异的性能。
磁总场和磁矢量场及其梯度探测技术已趋于成熟,然而,随着现代军事目标逐渐小型化、复杂化,伪装技术和传感器技术不断发展,磁目标探测需求也随之提高,从最初的仅探测目标是否存在逐步向目标定位、反演和识别等深层数据解释方向拓展,因此磁场测量信号的阶次和维度都需要进一步提高。磁梯度张量表征了磁场分量在3个正交轴方向上的一阶或高阶梯度,能提供比磁总场、磁总场梯度和磁矢量场更丰富的磁异常细节,数据潜力大、信息密度高,并且已被证实在磁目标精确定点定位、跟踪扫描、反演识别等方面具备巨大潜能[13],在军事和民用领域内都受到了非常广泛的关注。20世纪80年代,美国海军水面作战中心研究团队开始利用磁梯度张量进行水下目标定位和搜索等场景的相关理论和应用研究[65],此后澳大利亚[13-14]、德国[24]、意大利[66]、新加坡[67-69]等国的学者相继在21世纪初研制了磁梯度张量测量仪器并进行了相关试验,测量仪器的应用覆盖水下目标定位、考古调查、海底管道检测、山脉矿藏图绘制、未爆弹反演识别、潜艇监测跟踪等。我国针对磁梯度张量的理论研究始于20世纪90年代,中国地质大学的管志宁教授团队早先研究了正演和反演理论[70],直至2008年,该团队的成员吴招才博士等人逐步完善了磁梯度张量场正反演理论并将其应用于地质勘察[71]。吉林大学仪器科学与电气工程学院于2010年最先开展了磁梯度张量测量仪器的设计和原理样机研制工作,2011年吉林大学刘光达、王君教授团队研制高温超导磁梯度张量仪[72],2013年林君、随阳轶教授团队研制磁通门磁梯度张量系统[73]。然而,我国的整体技术和研究经验相较于西方国家差距还很大,目前基于磁梯度张量系统的目标探测技术仍处于初期理论研究阶段,针对磁梯度张量的测量理论、目标定位、磁矩反演和分类识别等关键技术的研究仍需要进一步拓展和加强。
由于磁梯度张量本质为磁矢量在正交轴方向上的高阶偏微分导数[74],现阶段常通过对基线距离间的矢量传感器(以SQUID和磁通门传感器为主)分量读数做差分计算来替代偏微分,从而实现磁梯度张量分量的间接测量,实现该过程的测量仪器被称为磁梯度张量系统。对磁梯度张量系统的研制工作基本始于21世纪初期,国外一些研究机构已率先将磁梯度张量系统应用于工程实践中并取得一定成果,而国内对磁梯度张量系统的研究尚处于科学探索和原理样机研制阶段。
超导材料处于低温液氦或液氮中冷却,当降温到某一临界温度(如绝对零度)时电阻消失,即实现超导。约瑟夫森效应和超导现象使电流通过材料后不产生电压降[75],在电流达到临界值后超导现象消失。临界电流对外部磁场变化极度敏感,其电流周期为约瑟夫森结内磁通量的约束函数,反映出约瑟夫森结在轴方向上的磁场变化,可凭借该现象制成精度达fT级的磁矢量传感器,甚至能捕捉人体心跳和脑磁场的微弱变化[76]。这种基于超导现象研制的磁力仪称为SQUID,分为高温型(77 K,使用液氮冷却)和低温型(4 K,使用液氦冷却)两种[65,77-78]。
磁通门传感器的探头主要由激励线圈、感应线圈和高磁导率的磁芯构成[79],两个线圈分别绕于磁芯两端。激励线圈通电产生激励磁场使磁芯磁化并处于饱和状态,随着外界磁场的变化感应线圈的附加感应电势发生变化,从而测得磁芯方向上的磁场变化,将磁芯正交放置即可制成三轴磁通门传感器。磁通门传感器量程大、可靠性高、稳定性好、温度要求低、精度保持能力优秀。此外,磁通门探头体积小、价格低廉、易于适配和安装,可为磁梯度张量系统的搭建提供更多可能性。
SQUID目前仍处于科学研究阶段,它的技术复杂、工作条件苛刻、成本昂贵。相比之下,磁通门传感器的发展已趋于成熟,目前市面上已研发出多款先进的磁通门传感器并投入量产,例如英国Bartington仪器公司生产的Mag-03和Mag-13系列磁通门传感器和中国华舜高科公司生产的HSF1系列磁通门传感器均能达到 的频域噪声,量程可达-70~+70 μT,特别适用于地磁场(磁总场约50 μT)环境中的小型磁目标探测。以HSF1型传感器为例,长度在12 cm以内,质量不超过220 g,便携性和集成化程度高。
的频域噪声,量程可达-70~+70 μT,特别适用于地磁场(磁总场约50 μT)环境中的小型磁目标探测。以HSF1型传感器为例,长度在12 cm以内,质量不超过220 g,便携性和集成化程度高。
此外,磁通门传感器测量稳定、对环境温度无苛刻要求、量程大、成本低、结构简单、外形小巧规则且易于适配,更易搭建成各类差分式测量结构的磁梯度张量系统。综上,本书将主要围绕以磁通门传感器搭建的磁梯度张量系统进行目标探测技术研究。
美国是磁梯度张量系统研究和应用十分成熟的国家。早在1995年和1997年的公开报道中,美国海军水面作战中心(Naval Surface Warfare Center,NSWC)沿海系统站(Coastal Systems Station,CSS)开发了一种超导梯度计/磁强计传感器(Superconducting Gradiometer/Magnetometer Sensor,SGMS)系统用于浅水海域的目标探测和分类,CSS将SGMS系统固定在船底或飞机拖曳平台上,为美国海军展示埋藏式地雷/海雷探测及水下金属物探测等功能[80-81],且SGMS梯度灵敏度达到了 @0.1 Hz量级,这是文献记载磁梯度张量系统的最初尝试。
@0.1 Hz量级,这是文献记载磁梯度张量系统的最初尝试。
根据国际海洋会议的公开报道,自2002年起NSWC成立了两个磁探测专研小组,放弃了SQUID,转为研制磁通门传感器磁梯度张量系统:其一是来自CSS的Bono小组[39-40],主要研发小型无人水下航行器的实时跟踪磁梯度仪;其二是来自巴拿马城分部(Panama City Division,PCD)的Wiegert小组[41-42]主要研发探测矿井和未爆弹的单兵手持式磁梯度张量测量系统。Bono小组最初采用等边三角形的磁通门张量结构[39],即由3个安装在角落和1个安装在中心槽的三轴矢量磁强计搭建而成的实时跟踪梯度仪(Real-time Tracking Gradiometer,RTG),捷联于水下无人潜航器(Unmanned Underwater Vehicle,UUV)上,用于浅水海域探雷,称为水下无人潜航器实时跟踪梯度仪(UUV-Real-time Tracking Gradiometer,UUV-RTG)[40],如图1-1所示。
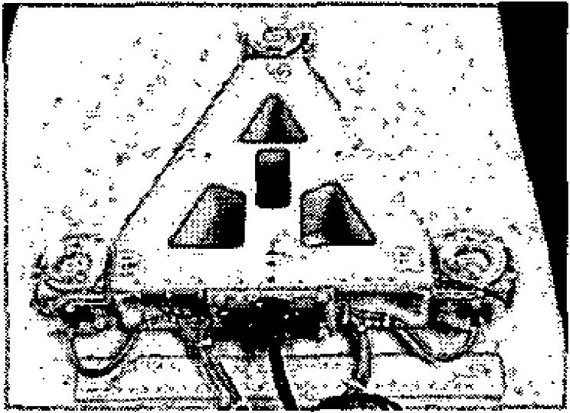
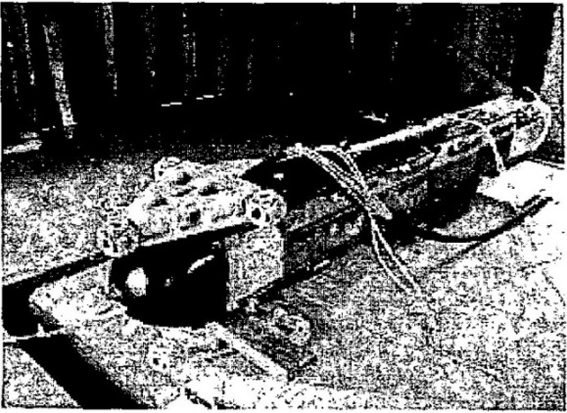
图1-1 Bono小组研发的初代UUV-RTG[39-40]
随后Bono小组研制了名为“Bluefinl2”的第二代UUV-RTG,并于2005年进行了水下传感器测试与目标探测试验[82]。Bluefinl2分为标准版本和翼装版本,翼装版本集成了RTG和由美国佛罗里达大西洋大学为其设计的埋藏物体扫描声呐(Buried Object Scanning Sonar,BOSS)[82-83],如图1-2所示。第二代UUV-RTG由1个传感器头和1个铝制电子瓶组成,传感器头由4个Billingsley Magnetics公司生产的三轴磁通门传感器(型号为TFM 100G2-RLN)组成,传感器均由三轴亥姆霍兹线圈包裹用于降噪和实时补偿传感器输出误差,综合噪声水平低于 [40]。该系统的3个主传感器基线间隔165 mm,可同步测量磁梯度张量的5个独立分量,而第4个传感器位于同一底板中心,用于输出校准参考,并为其他传感器提供磁测信号反馈[82]。
[40]。该系统的3个主传感器基线间隔165 mm,可同步测量磁梯度张量的5个独立分量,而第4个传感器位于同一底板中心,用于输出校准参考,并为其他传感器提供磁测信号反馈[82]。
图1-2 Bono小组研发的具备降噪和实时误差补偿功能的第二代UUV-RTG
系统Bluefin l2[40,82-83]
与此同时,PCD的Wiegert小组于2002年开始为美国海军研究办公室研发一种新型标量三角测量和测距(Scalar Triangulation And Ranging,STAR)系统[41](结构和样机见图1-3),由3组三轴磁力计-加速度计(Triaxial Magnetometer- Accelerometer,TMA)组成,用于浅水区黑色金属矿物和地雷的探测、定位和分类(Detection,Localization and Classification,DLC),并进行了一系列现场测试,被证实在“数米”范围内对地雷具有较强的空间探测和定位能力。
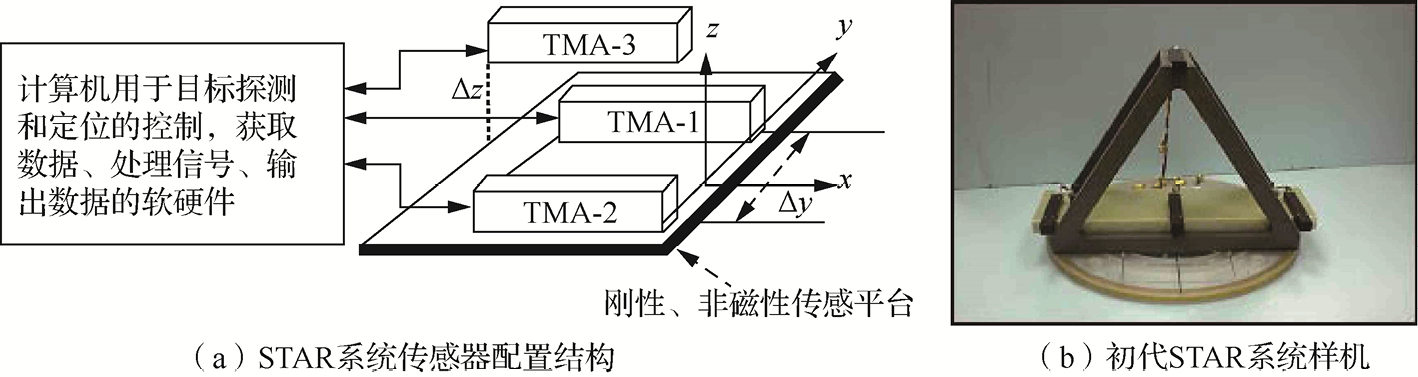
图1-3 Wiegert小组研发的三轴九通道TMA阵列和初代STAR系统[41]
2005年,Wiegert小组报告了一种用于DLC检测的改进型磁梯度张量STAR系统,命名为3-D STAR系统[42],如图1-4(a)所示。该系统利用了7个矢量传感器,可同步测量二阶磁梯度张量的全部9个分量。根据2009年美国NSWC代号为“MM-1511”的国防部战略环境研究与发展计划(Strategic Environmental Research and Development Program,SERDP)项目报告[84],Wiegert小组对3-D STAR系统进行最终改进,采用8传感器(TFM-1~TFM-8)立方阵列,能同时测量8组磁矢量和5个独立的磁梯度张量分量,该阵列被命名为“STAR Cube”结构,如图1-4(b)所示。报告显示,Wiegert小组研制了一款用于近地浅表未爆弹、地雷DLC的单兵手持式便携磁探测STAR系统,在现场对磁矩强度为14.5 A·m2的金属物在4 m范围内都具有极高的定位和磁矩估计精度[84],该系统设计草图和野外现场测试如图1-5所示。
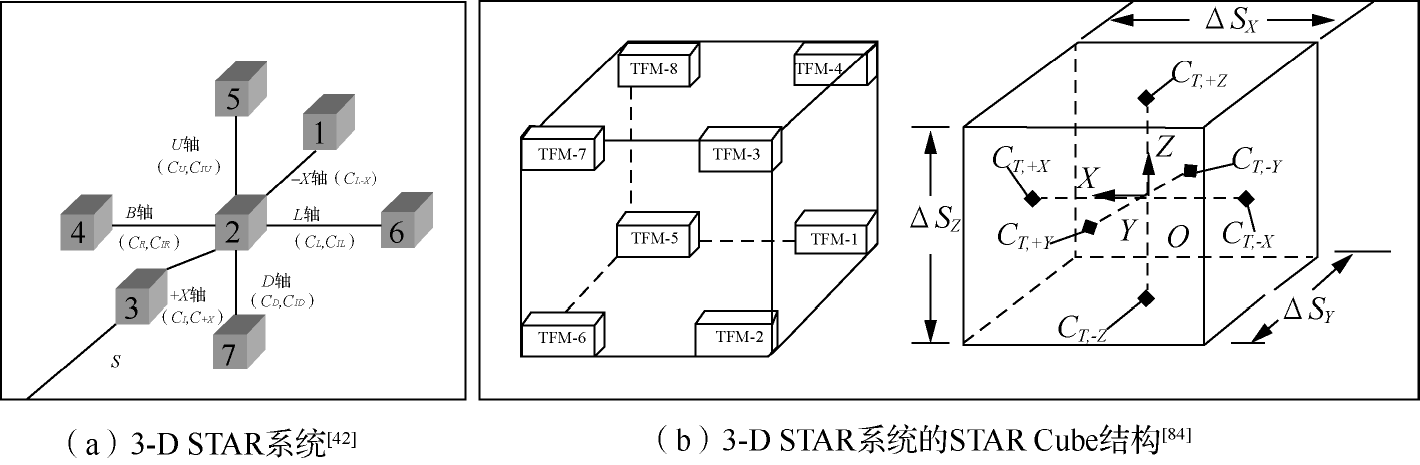
图1-4 Wiegert小组设计的改进型3-D STAR系统概念及其“STAR Cube”结构[42,84]
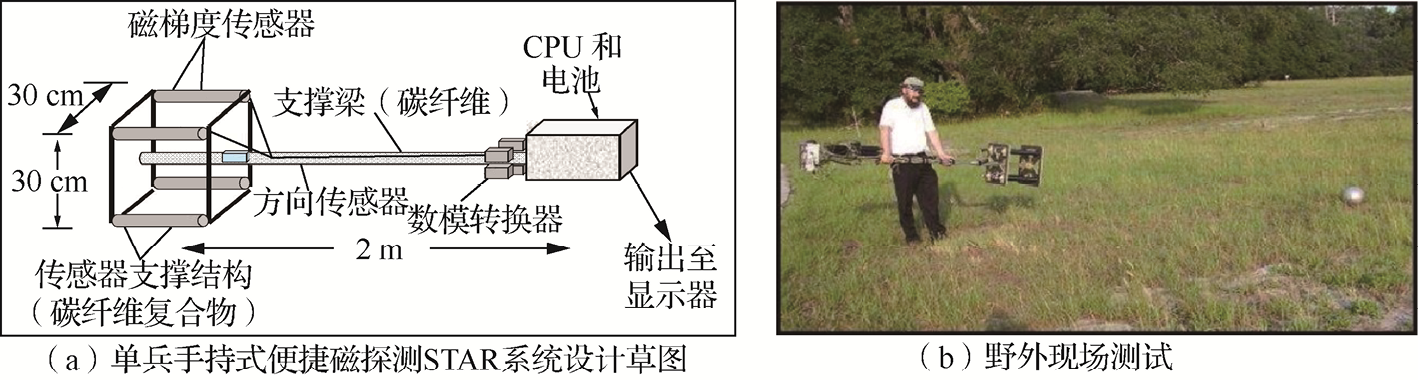
图1-5 用于近地浅表未爆弹、地雷DLC检测的单兵手持式便携磁探测STAR系统[84]
美国地质调查局(United States Geological Survey,USGS)以Bracken为代表的研究团队自20世纪90年代开始磁梯度张量测量的相关研究,2003年该团队研制了第一代磁梯度张量系统“TMGS”(Tensor Magnetic Gradiometer System)[32]。该系统为正四面体结构,由4个间距1 m,并固定在框架顶点上的磁通门探头组成,能同步采集12组独立磁场分量,并通过分量间冗余计算量化和消除张量噪声。2004年,该团队进行了TMGS自旋校准工作[33],同时开展了未爆弹探测试验[85-87],通过小型拖车和7 m长牵引杆拖曳TMGS进行往复测量[87],获得了一片未爆弹埋藏区域磁张量场数据,如图1-6所示。
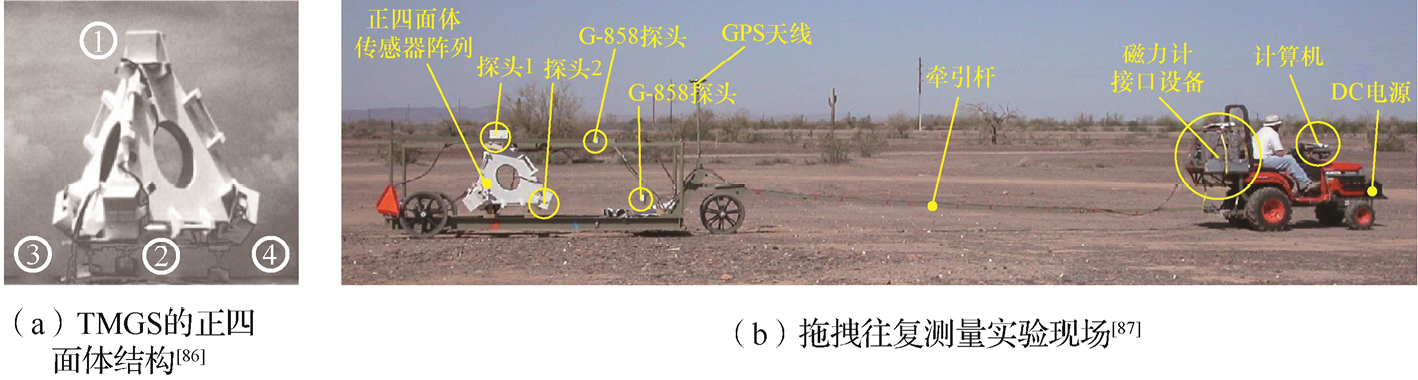
图1-6 USGS研制的第一代正四面体TMGS进行自旋校准和试验场探测工作[86-87]
2008年,在USGS的美国国防部SERDP项目报告[34,87]中提出了第二代TMGS,采用基线距离为0.25 m的平面十字形磁通门结构,4个磁通门传感器固定在玻璃陶瓷基板上,并用测线对齐,传感器探头被隔热盒覆盖,如图1-7(a)~(c)所示。研究人员使用简易拖曳机构引导TMGS在标记的红色校准圆盘单元间采样并校准系统[34],搭建了木质测量台架进行未爆弹和金属物体的多姿态测量实验,如图1-7(d)和(e)所示,成功绘制了40 mm、60 mm、81 mm、105 mm等口径和BLU-26、M42和BDU-28等型号的弹体,以及各类异形金属物的全张量梯度图。
此外,美国橡树岭国家实验室的研究团队同样依托SERDP项目于2004年设计开发了机载平台的SQUID全张量航磁梯度仪,用于检测和绘制未爆弹磁场分布[88];2012年,美国天空研究所与澳大利亚联邦科学与工业研究组织(Commonwealth Scientific and Industrial Research Organization,CSIRO)受美国国防部SERDP项目资助[38],联合开发了六平面式高温SQUID张量系统,梯度测量灵敏度达到 [35-36],旨在解决海洋环境中的军事目标和水下未爆弹探测问题,并在4 m探测距离内实现了小型弹丸(口径大于40 mm、磁矩强度大于0.01 A·m2)的探测、定位和表征[36]。
[35-36],旨在解决海洋环境中的军事目标和水下未爆弹探测问题,并在4 m探测距离内实现了小型弹丸(口径大于40 mm、磁矩强度大于0.01 A·m2)的探测、定位和表征[36]。
图1-7 USGS研制的第二代平面十字形TMGS用于未爆弹等目标多姿态二维网格测量[34]
德国是将SQUID磁梯度张量系统应用最广泛的国家。1997年,德国耶拿物理学高技术研究所(Institute for Physical High-Technology,IPHT)启动了一项计划,旨在利用基于液氦冷却薄膜技术的低温SQUID(LT-SQUID)开发机载全张量磁梯度(Full Tensor Magnetic Gradiometry,FTMS)系统[24]。2004年,IPHT利用FTMS系统在南非进行了数百小时的飞机拖曳飞行测试,并测得100 km2的二阶磁梯度张量完整独立分量数据图,这是世界首次获得的FTMS实测数据[31,89]。IPHT将该系统命名为JESSY STAR,联合旗下Supracon公司量产销售[24,90],该系统利用直升机进行拖曳,结构如图1-8(a)所示,以SQUID探头及其附件构成的磁测系统为核心模块,同时配备了数据采集模块、惯性导航模块和全球定位模块等附属模块,共同组成了FTMS测量系统[24]。2012年,IPHT对JESSY STAR系统进行空气动力学优化后设计了新一代“Air Bird”系统[19,91],如图1-8(b)所示,该系统梯度灵敏度达到 [92]。
[92]。
图1-8 IPHT研制的航空机载FTMS系统JESSY STAR[24,90]和Air Bird[19,91]
此外,IPHT量子电子系联合旗下Supracon公司和德国耶拿弗里德里希·席勒大学材料科学与技术学院于2007年起合作开发了一款地面轮式车辆搭载的SQUID磁梯度张量系统,用于在考古时进行土壤金属检测[29]及浅层区域地下未爆弹的精确定位搜索[30],如图1-9所示。该系统由一个基于玻璃纤维增强塑料的非磁性车辆组成,轮式车辆携带了3个超导磁梯度张量探头,并由液氦冷却的低温恒温器包裹,每个探头包含多个低温(4.2 K)SQUID传感器,并且配备了实时记录传感器姿态的惯性系统。
图1-9 IPHT研制的地面轮式捷联SQUID磁梯度张量系统[29,30]
CSIRO在2004年报道了该组织团队研制的一款液氮(-196℃或77 K)冷却的高温SQUID(HT-SQUID),并设计搭建了一种新颖的自旋式磁梯度张量系统GETMAG[93],该系统采用伞形轴向梯度鼓配置,通过围绕其单轴梯度鼓的自身z轴45°旋转和围绕圆盘120°增量旋转,可在同一观测点获取24个张量分量值,GETMAG的自旋结构设计如图1-10(a)所示,野外测试现场如图1-10(b)所示。
图1-10 CSIRO研制的高温SQUID伞形单轴梯度鼓自旋式磁梯度张量系统GETMAG[89]
2009年,CSIRO在SERDP项目资助[94]下研制了磁通门梯度张量系统(见图1-11),该系统选用4个低噪声三轴磁通门探头(英国Bartington仪器公司生产,型号为MAG-03MSEL70,灵敏度噪声低于 )安装在正交骨架上,基线距离约为0.7 m[95]。作为GETMAG替代方案,该磁通门张量系统易于安装、方便供电和读取、可操作性强,能同步测量完整的二阶梯度张量,且不需要低温冷却,但缺点是张量差分计算的测点未能统一,会导致系统性的结构误差。
)安装在正交骨架上,基线距离约为0.7 m[95]。作为GETMAG替代方案,该磁通门张量系统易于安装、方便供电和读取、可操作性强,能同步测量完整的二阶梯度张量,且不需要低温冷却,但缺点是张量差分计算的测点未能统一,会导致系统性的结构误差。
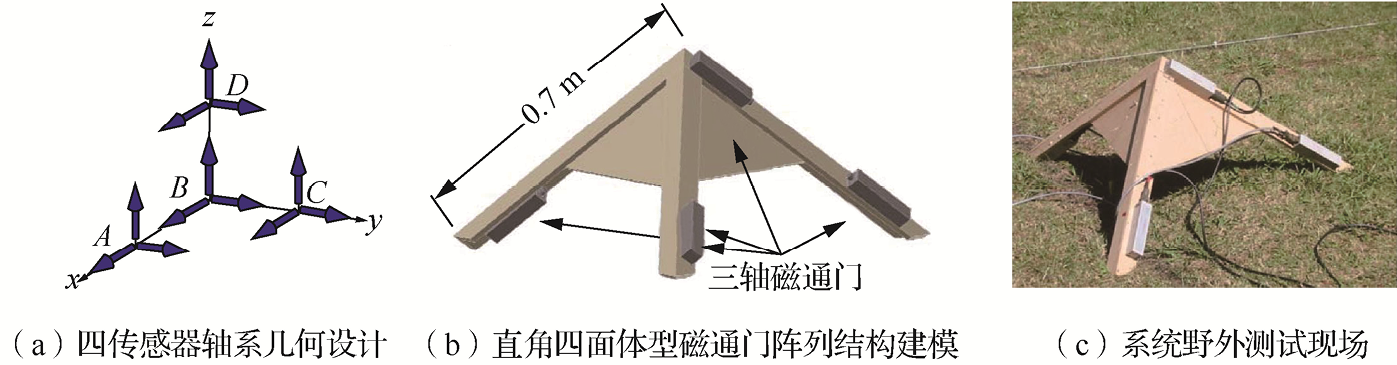
图1-11 CSIRO研制的四磁通门探头的直角四面体型磁梯度张量系统[94-95]
新加坡国防科技研究院国家实验室(DSO National Laboratories,DSONL)自21世纪初开始磁梯度张量系统的研发工作。2004年,DSONL报道了Pei团队设计的磁通门磁梯度张量系统原型[67],由4个MAG-031E型(英国Bartington仪器公司仪器)磁通门传感器组成,置于基线距离0.2 m的直角四面体框架顶点处,如图1-12(a)所示。2010年前后,该团队开发了用于水下未爆弹探测的自主水下航行器(Autonomous Underwater Vehicle,AUV)捷联式第二代磁梯度张量系统[68],能快速实现水下目标的范围搜索、姿态和磁矩估计。图1-12(b)显示了该系统的配置结构[69]:由4个低噪声版MAG-03型(英国Bartington仪器公司仪器)磁通门传感器组成并集成于AUV鼻锥;系统模块主体由塑料材质制成,以最大限度地减少磁干扰;其中3个传感器构成等边三角形结构,用于张量测量,基线距离约为0.24 m,而第4个传感器位于模块的前部,用作感应地磁场的读数参考。Pei团队还制作了校正该系统的无磁旋转平台[69],如图1-12(c)所示。
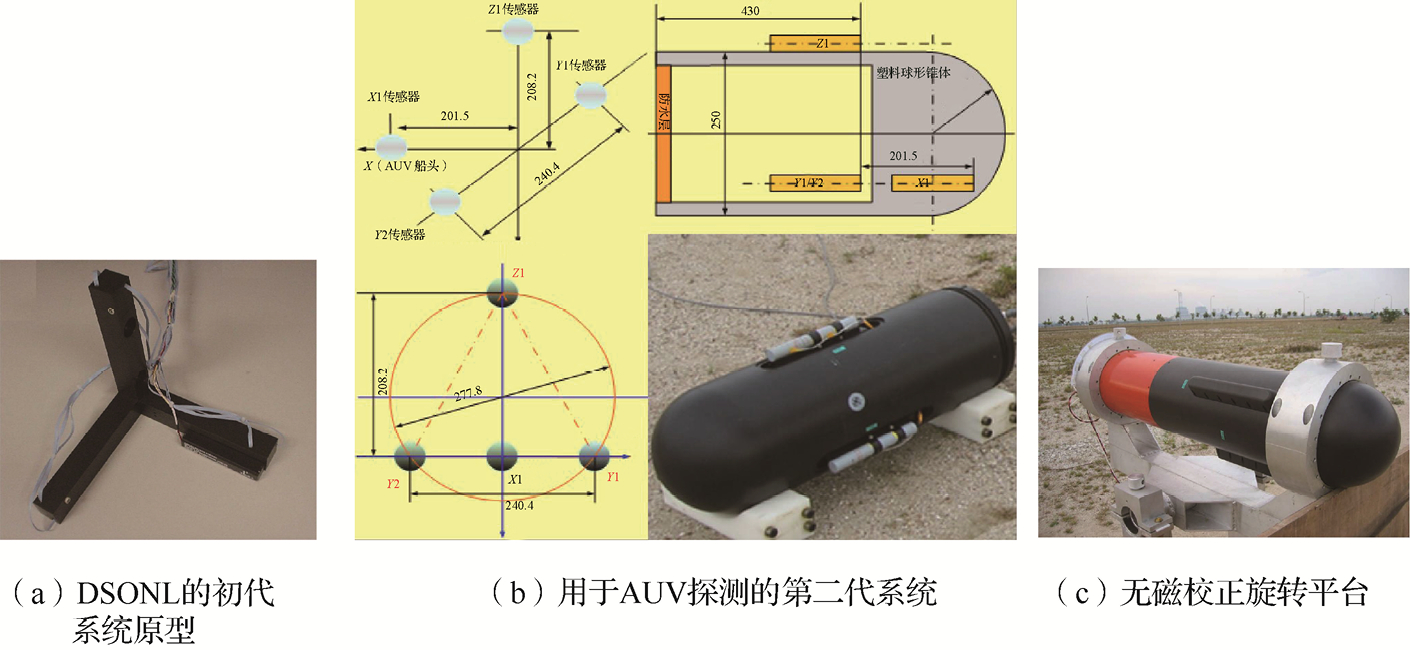
图1-12 DSONL研制的用于AUV水下未爆弹自主探测的磁梯度张量系统[67-69]
根据2015年联合国海洋大会的公开报告,意大利国家科学院2007年开始张量测量系统的研究,并于2012年提出了S3MAG项目(POR-FESR 2007-2013),旨在研制用于低磁噪声AUV目标探测的磁通门结构全磁张量梯度仪[66],该系统采用三角形结构,原型机如图1-13(a)所示,测量分辨率达到0.1 nT/m。图1-13(b)显示了该系统的CAD设计[66],主体由4个径向臂支撑并固定了3个磁通门探头和定位接收器,AUV前端配有2个方向螺钉,而容器后部由2个螺旋桨推进器提供动力。S3MAG项目通过改进降噪和采集处理方法尽量减少AUV系统产生的磁噪声,并通过测量完整二阶磁梯度张量的9个分量来描述水下目标的位置和形状。

图1-13 S3MAG项目研制的三角形结构磁梯度张量系统用于AUV探测[66]
捷克理工大学于2015年研发了一款紧凑型磁通门全张量梯度仪,该系统由10个单轴磁通门线圈组合成一个边长为46 mm的立方体紧凑型磁张量探头,主体为塑料材质,内部结构采用简化的平面十字形排列,如图1-14所示[96]。为了减小近距离磁通门线圈间的互相影响,研究者设计了一个多路反馈补偿回路,利用多路复用控制器来防止传感器受到其他线圈反馈磁场的干扰,从而使得系统在微型化的基础上仍保持了 的梯度测量灵敏度噪声水平[96]。该团队还设计了一个三轴亥姆霍兹线圈,用于对该紧凑型磁梯度张量系统进行校准和误差补偿[97]。
的梯度测量灵敏度噪声水平[96]。该团队还设计了一个三轴亥姆霍兹线圈,用于对该紧凑型磁梯度张量系统进行校准和误差补偿[97]。
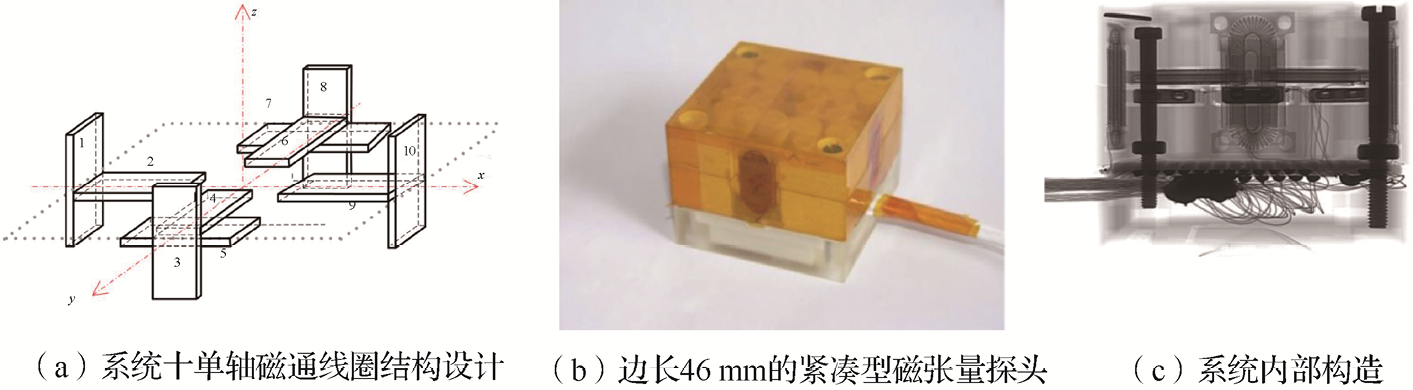
图1-14 捷克理工大学研制的十字形紧凑型磁梯度张量系统[96]
此外,英国Bartington仪器公司研发的型号为Grad-01-1000L的单轴式磁通门梯度磁力仪,最高分辨率达0.03 nT/m,已应用于考古、地球物理勘察和未爆弹检测[98]。
国内针对磁通门磁梯度张量系统的相关研究始于2010年。哈尔滨工程大学的黄玉在2010年博士学位论文中介绍了磁张量数据解释方法与系统搭建策略[99]。2011年,吉林大学全张量磁测技术实验室开展了航空磁梯度张量系统的初期研制工作[73],进行了磁通门张量结构设计、误差分析与水下定位研究[100]。2013年,吉林大学随阳轶团队研制了带球形反馈线圈的紧凑型磁通门全张量磁梯度仪[21],如图1-15所示,该仪器由平面十字形结构的4个磁通门探头和球面反馈线圈组成,一个磁通门作参考,通过控制反馈线圈的电流使得磁通门在接近无磁场环境中工作,张量输出精度高且稳定。该设计避免了通常由每个磁通门的单个反馈线圈引起的串扰,并减少了正交误差和非对准误差。此外,可利用球形反馈线圈直接给出校准参数。在无屏蔽实验室条件下,该磁梯度仪的梯度灵敏度噪声收敛于 [21]。
[21]。
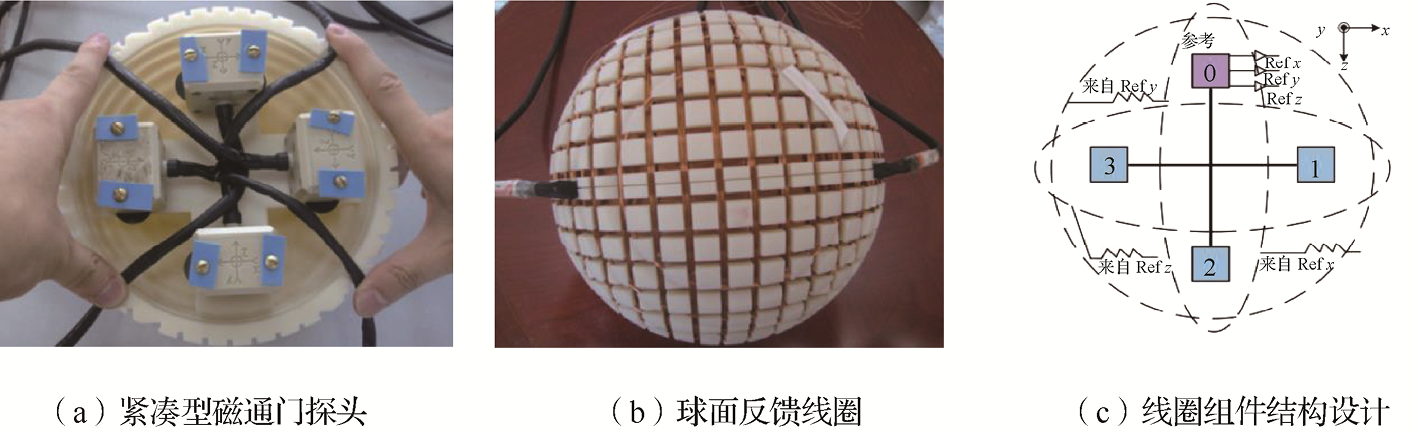
图1-15 吉林大学研制的带球形反馈线圈的紧凑型磁通门全张量磁梯度仪[21]
国防科技大学(National University of Defense Technology,NUDT)自2012年起开展磁梯度张量系统的研制工作。2013年,NUDT团队利用4个德国DM-050型磁通门传感器搭建了图1-16(a)所示的平面十字形梯度张量系统[101]。团队进行了该系统的误差校正[101-102]、磁干扰补偿[103]和非线性温度补偿[104]等工作,图1-16(b)所示为张量系统加入载体硬、软磁干扰过程,图1-16(c)所示为进行非线性温度补偿的无磁温控箱。
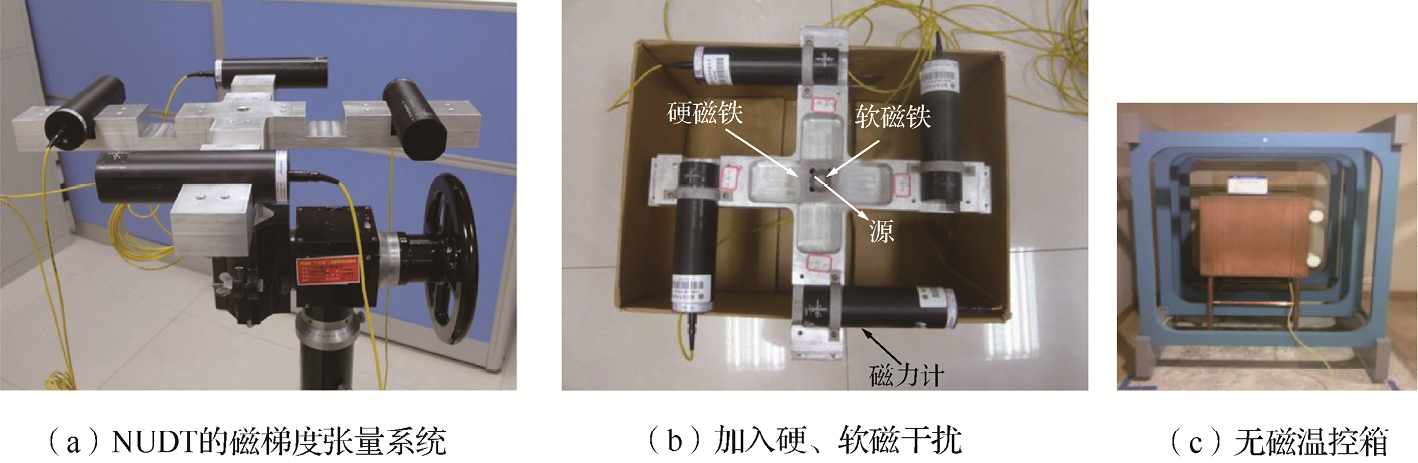
图1-16 NUDT研制的平面十字形磁梯度张量系统与磁干扰补偿、温度补偿实验[101,103,104]
中国科学院电磁辐射与探测技术重点实验室团队参考美国NSWC研发团队设计的STAR系统[84],成功搭建了搭载英国Bartington仪器公司的磁通门探头的“STAR Cube”结构磁梯度张量系统,并于2017年成功进行了系统校准和野外铁磁性目标定位实验[105],该结构的磁梯度张量系统建模设计如图1-17(a)所示,实验现场如图1-17(b)所示。
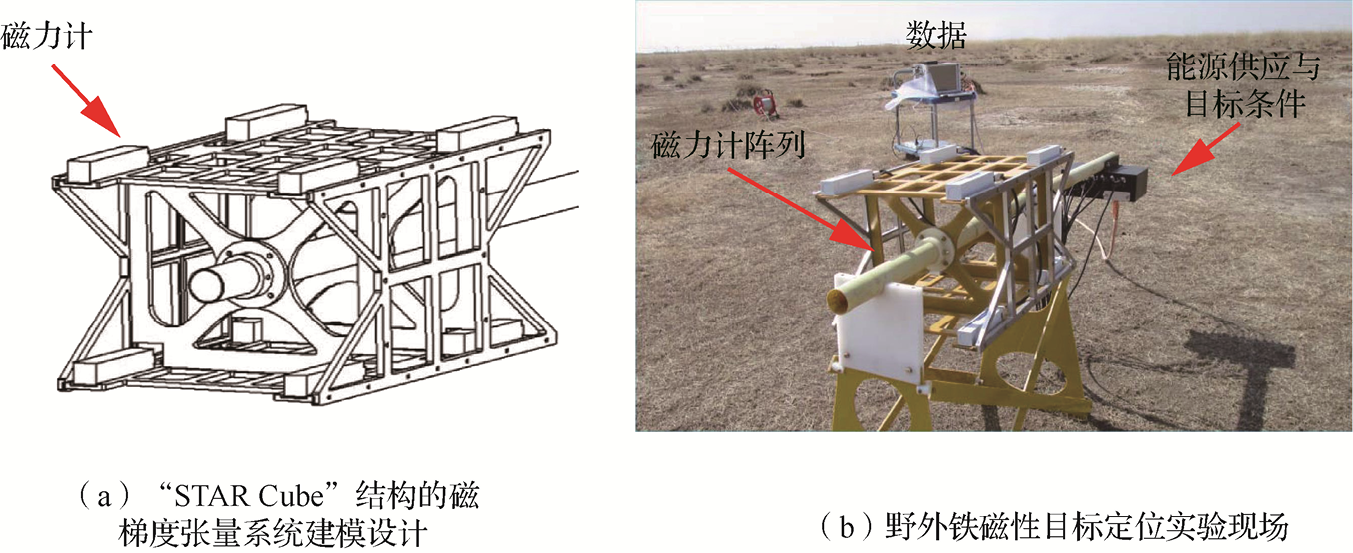
图1-17 中国科学院团队搭建的“STAR Cube”结构的磁梯度张量系统[105]
此外,陆军工程大学于2010年开始了磁梯度张量相关理论研究,并于2012年搭建了磁梯度张量系统样机,设计了三轴无磁转台对系统进行校正和误差补偿[106-107]。近年来,海军工程大学、海军航空工程学院等也相继开展了磁梯度张量理论研究及磁通门张量系统的研制工作[108-109],均取得了一定进展。
国内针对超导磁梯度张量系统的研制工作,最早可追溯到“十一五”期间,吉林大学在国家“863计划”重大项目“航空地球物理勘查技术系统”的支持下,研制了六棱台平面式高温超导磁梯度张量系统并进行了野外试验[72]。2017年吉林大学研制了新一代高温HT-SQUID测量系统[110-111],主体由张量探头(6个高温SQUID梯度计置于正六棱台的6个侧面)、三轴磁强计(3个正交的高温SQUID单轴磁强计)、支架、无磁液氮杜瓦构成。此外,中国科学院上海微系统与信息技术研究所于2013年立项开展航空全张量磁梯度测量仪器的研制,该团队同样采用六棱台平面式SQUID梯度仪结构,梯度测量灵敏度达到 [112],于2016年成功进行“低温超导LT-SQUID全张量梯度系统”现场演示,利用直升机拖曳系统测量并获取了10 m×10 m方形区域的磁梯度张量数据图[112-113]。
[112],于2016年成功进行“低温超导LT-SQUID全张量梯度系统”现场演示,利用直升机拖曳系统测量并获取了10 m×10 m方形区域的磁梯度张量数据图[112-113]。
“十二五”期间,吉林大学和中国科学院上海微系统与信息技术研究所分别受到了国家“863计划”重大项目和国家重大科研装备研制项目的支持,并在前期的研究工作基础上,相继开展了新型SQUID磁梯度张量系统的设计与研制工作。其中,上海微系统与信息技术研究所依托国家重大科研装备研制项目“深部资源探测核心装备研发”,进行了低温SQUID磁梯度张量系统研制工作;吉林大学则继续依托“863计划”重大项目“航空地球物理勘查技术与装备”进行了高温SQUID磁梯度张量系统的优化设计和研制。
磁梯度张量系统(特别是磁通门阵列系统)的测量读数偏差受多重原因综合作用,磁梯度测量误差可达上千nT/m[106]。针对磁通门张量系统的误差分析研究,2012年以来,吉林大学[100]、国防科技大学[114]和华中科技大学[115]等分别对磁通门阵列结构误差、单磁通门传感器系统误差和机载测量磁干扰误差等误差机理和处理方法进行了深入研究,取得了一定的研究进展。总结目前磁通门梯度张量系统的测量误差因素有如下4个部分。
(1)传感器系统误差。因磁通线圈缠绕工艺和正交对准精度限制,磁通门传感器存在系统误差,包括零位偏差、灵敏度标度因子误差和非正交误差[106-107]等线圈工艺类误差,以及非线性温度误差[104,116]和磁滞[117]等磁芯材质类误差。
(2)非对准误差。磁梯度张量系统本质是由多个磁矢量传感器构成的结构阵列,磁矢量传感器的输出轴本就与各自外壳非一致对准,而多个传感器的阵列更是存在装配时引入的位移、旋转非对准误差[100,118]。
(3)磁干扰误差。载体(无人机、无人车和水下自主机器人等)铁磁性金属材质产生硬、软磁干扰[114,119],金属软磁材料切割磁感线产生涡磁干扰[120]等。
(4)综合磁噪。磁通门传感器的出厂本底噪声,以及载体电机、采集设备和电路产生的电磁场干扰和地磁脉冲等噪声的综合作用[121],使得分量读数存在高频无规律波动的综合磁噪。
由磁通门传感器阵列构成的磁梯度张量系统,误差本质源于磁通门探头的系统误差及传感器阵列结构和传感器输出轴间的非对准误差。目前对磁梯度张量系统的校正思路多为利用无磁转台将传感器绕轴旋转采样[118],从而提取旋转姿态下的传感器采样读数,并利用算法进行误差校正。例如,北京理工大学空间磁技术与应用研究室团队[122]设计了用于磁通门传感器阵列校正的无磁旋转平台,陆军工程大学磁异探测技术实验室团队[107,118]研发了用于磁梯度张量系统校准的三轴无磁转台等。
磁梯度张量系统的误差校正方法主要分为直接校正和间接校正两类。
(1)直接校正法
一般是对张量系统的误差参数进行原理分析和精确数学建模,获得误差参数、理想输出和实际输出之间的数学转换模型,并利用算法和工具解算出对应的各类误差参数值,以此对传感器输出进行修正,其本质为参数解算和寻优过程。当前较成熟的方法有线性和非线性最小二乘法、高斯—牛顿迭代法、递归拟合方法。早在2000年,Merayo等人就仅利用线性最小二乘估计,通过标量参考读数来估计矢量磁力计的误差参数[123];Pylvanainen等人利用递归拟合算法自适应更新传感器误差参数[124];Alonso等人利用高斯—牛顿迭代法算法估计磁传感器零位偏差、正交度和灵敏度误差等[125]。此外,国内相关学者近年来不断完善磁传感器阵列系统的误差校正算法,例如,陆军工程大学的李青竹等人提出的磁梯度张量系统的非线性集成矢量校正方法[126],能够一次性估计十字形张量系统48个误差参数,以“人造”平台矢量为校准参考实现了低成本矢量校正,提高了误差参数估计精度和校正效率;国防科技大学智能科学学院的王振雄等人提出利用粒子群算法对磁传感器系统进行一体化校正[127];苏州大学的徐祥团队基于自适应参数设计了三轴磁强计的实时校正方法[128],进一步提高了校准精度;海军工程大学的陈浩团队提出了一种基于改进型入侵野草算法的磁传感器正交误差最小二乘校正方法[129],有效提升了噪声抑制率;吉林大学高全明博士研究了一种基于椭球假设标量校正方法[130],用于固定翼无人机的航磁矢量传感器阵列系统的误差校正,在野外取得了较好的校正实验效果。这些算法均通过估计传感器阵列的各类误差参数来校准实际测量输出信号,称为直接校正法。
(2)间接校正法
一般是通过信号处理或机器学习方法直接对传感器输出进行理想化校正,而不计算传感器误差参数的具体数值。如Crassidis等人分别利用顺序中心、扩展卡尔曼滤波(Extended Kalman Filter,EKF)和无迹卡尔曼滤波(Unscented Kalman Filter,UKF)对磁传感器输出进行直接校准[131]。国内,清华大学吴德会等人利用函数链接型人工神经网络(Functional Link Artificial Neural Network,FLANN)直接抑制了磁传感器的三轴输出误差[132];北京邮电大学的赵方团队研究了基于赋权遗传算法在磁传感器校正中的应用[133],该算法被证实能有效提升磁传感器输出精度和校准稳健性。这些跳过误差参数求解过程,直接校准传感器输出的方法,称为间接校正法。
直接校正法对测试和校准环境要求相对严格,参数解算过程复杂,环境不确定性易对校正效果造成影响,但可直接获取传感器各类误差参数的具体数值,校正结果鲁棒性和可靠性更佳;间接校正法倾向于复杂环境中的系统快速校准,单次校准具有较高精度,但校正结果是实时性的,校正鲁棒性欠佳。
磁性目标探测技术需解决的重要问题是如何消除环境中的其他磁场干扰、机载平台的磁异常干扰、地磁日变等干扰因素的影响,因此,载体磁干扰补偿研究长期成为国内外研究人员的热点问题。目前,针对磁干扰的补偿方法主要分为硬补偿和软补偿。
(1)硬补偿
硬补偿也被称为主动补偿,是早期研究者对直升机或飞行器的航磁干扰补偿常用的方法。一般施加3D亥姆霍兹线圈或外部永磁体,通过调节线圈中的电流来控制磁传感器周围的磁场,或改变载体中永磁体的布置规则,以此抵消环境中的磁异常干扰。例如,NSWC的Bono小组研制的UUV-RTG水下无人潜行实时跟踪系统中,磁传感器均由三轴亥姆霍兹线圈包裹[39-40],其中参考传感器的磁测电流被加载到其他磁传感器的亥姆霍兹线圈上,实现降噪和载体磁干扰的实时补偿;中船重工七一〇所张海波团队[134]设计了一种交变磁场复现系统和磁屏蔽装置用于环境磁干扰的主动补偿,在测试环境中对典型扰动磁场具有显著补偿效果,并已在标准梯度磁场装置和低剩磁低噪声屏蔽室中得到了应用;北京卫星环境工程研究所团队[135]在型号CM2的大型磁屏蔽实验室中利用亥姆霍兹线圈设备对无人驾驶飞行器(Unmanned Aerial Vehicle,UAV)的磁干扰误差和电磁噪声进行了主动补偿和降噪实验等。
(2)软补偿
软补偿也被称为被动补偿,这是现阶段研究人员研究的主流补偿方法。软补偿需根据当前环境的干扰机理进行计算机建模,通过模拟载体磁场干扰型,利用存储在计算机中的补偿参数对输出进行实时补偿,或对传感器读数进行后期处理,从而消除磁干扰影响。现有方法多基于Tolles-Lawson方程[136],将载体磁干扰分为固有磁场和感应磁场两类标准模型来实现补偿参数的估计。例如,于振涛团队针对捷联于UUV的四面体磁通门张量系统进行了载体磁干扰补偿模型推导和算法研究[137],在实验中成功补偿了实际输出中95.9%的载体磁干扰误差;林春生团队分析了直升机外挂磁测吊舱探测平台的载体磁干扰机理[120],获得了由飞机载体磁异常、吊舱摆动和航迹波动构成的综合磁干扰模型,实测中达到了90%以上的补偿率;庞鸿锋团队针对干扰磁场的原理特征、载体磁干扰线性模型补偿、载体磁干扰非线性模型补偿等问题进行了深入研究[103-114],并利用捷联地磁探测设备进行了实测验证;中国科学院遥感与数字地球研究所郭子祺等人分析了固定翼无人机的航磁测量系统磁补偿模型并进行了现场测试[119]。BP神经网络[138]、遗传算法[139]等被证实同样适用于Tolles-Lawson模型下的磁干扰补偿参数求解和寻优过程。
显然,硬补偿方法对补偿环境要求十分苛刻,常需要针对设备进行单独亥姆霍兹线圈设计建模与线圈绕制,成本高,适用于有高精磁测仪器校准和补偿需求的特殊环境(如大型磁测实验场或机房、严格无磁环境的磁屏蔽室等)。相比之下,软补偿方法不需要外部硬件改造,具有可操作性强、成本低、补偿效率高、鲁棒性好等优势。
磁测信号噪声来源广泛且特性复杂,例如载体电子设备工作时的脉冲磁噪声、供电系统电流产生的交变磁场噪声、地磁脉冲磁噪声、传感器出厂本底噪声等[140]。磁异探测中地磁信号常被认为以1 Hz范围内的低频信号为主,而综合磁噪声频谱很宽,包含高频磁噪声及与地磁频率接近甚至混叠的噪声分量。对高频磁噪声,可以通过频谱分析、滤波、屏蔽等降噪手段抑制,但对于与地磁场频带混叠的低频噪声,传统降噪方法受限。目前,公开报道中少有针对干扰磁场环境中综合磁噪抑制方法的研究。考虑到含噪声磁测信号属于复杂多频段混叠的非平稳信号,时频分析方法具备一定应用优势。常用时频分析法有短时傅里叶变换、小波变换、Gabor变换、Wigner-Ville分布等[141]。
基于经验模态分解(Empirical Mode Decomposition,EMD)的希尔伯特-黄变换(Hilbert-Huang Transform,HHT)是目前处理非平稳复杂信号的新方向[142],为磁测信号随机噪声的抑制提供了新思路,但该方法存在信号分解端点效应、样条函数稳定性差等问题。变分模态分解(Variational Mode Decomposition,VMD)[143-144]通过非递归求解时频域内对信号各分量的变分模态,可自适应分离信号的不同频带分量,可用于磁源分离[145]和降噪[146]。相比于传统时频分解,VMD抗噪声能力更佳,但仍存在端点效应和模态混叠。盲源分离的独立分量分析法也可应用于磁测信号处理。例如意大利国家地理与火山学研究所研究人员采用独立分量分析法对火山周边地磁信号进行降噪处理,取得了较好结果[147];中国地震局地球物理研究所谢凡等人应用独立分量分析法对地磁观测台阵测量信号进行了提取和剥离[148],使受干扰频段在剥离后恢复正常。形态学滤波是基于信号时域特性的非线性自适应滤波方法,在信号特征提取、信号干扰抑制、图像处理、模式识别等方面应用广泛,然而在涉及磁测量信号处理方面的内容时则少有应用。例如,早在2011年前后,谢凡团队就公布了一项利用形态滤波器处理地磁场信号混叠噪声和脉冲干扰的研究[149],结果显示形态滤波器有效提高了地磁测量信号的信噪比。
相对于单一方法,多种信号分析和降噪法组合被证实能更好地处理地磁信号噪声。国防科技大学的李季提出用形态学滤波、HHT和EMD的组合方法处理磁测数据[150],对各EMD信号进行低通滤波后再重构信号能有效抑制磁测信号的各类噪声;陈海龙将形态学滤波和EMD相互配合[151],较好地消除了磁记忆梯度张量信号的噪声;王海军等人利用形态学滤波和Hough变换有效提取了高分辨率道路遥感影像[152];西南石油大学郑华林团队利用总体平均经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)和分层阈值的组合方法进行磁记忆信号降噪等[153]。
磁性目标探测的关键问题是解决目标的位置和磁矩信息估计的问题。根据汽车或舰船磁法测量得出的经验法则[154],当磁测设备观测距离超过区域目标几何尺寸约2.5倍时,磁源偶极矩仍起作用,此时物体可以近似为磁偶极子[155]。在磁探测设备获取到目标周围磁场信息后,可以利用数学方法解算富含目标磁矩和位置信息的矢量场、梯度场和张量数据。这种利用周围磁场信号解算出磁性目标的位置、磁矩等信息的过程,被称为磁性目标定位[99],是磁性目标探测技术的重要途径和首要目标。
经典目标定位方法多以单一磁性目标为对象,且随着磁传感器的可测量参数阶次提升,针对单目标的定位方法和思路也有明显改进。一些早期和经典的研究思路是利用磁总场标量数据进行目标定位,但标量磁强计仅测取磁源周边的磁总场标量分布情况,信息量单一且不足,无法实现目标准确空间定位,研究人员依靠多传感器的组合能间接测量磁总场梯度而实现目标定向和区域跟踪,例如哈尔滨工业大学的樊黎明博士就主要以标量磁总场磁力仪阵列对水下和运动的单目标进行定位跟踪研究[156],证明用磁总场传感器如光泵磁力仪的阵列组合能较好完成单个目标的精确定位和快速跟踪,但这种解决方案无法有效估计磁源磁矩信息[157]。磁矢量传感器的推广使多个传感器应用功能得到巨大提升,理论上至少两个磁矢量传感器同步测量就能获取关于目标空间坐标和磁矩分量的超定方程,例如海军工程大学的林春生团队设计的一种利用对称排列的两个磁矢量传感器旋转测量实现磁性目标精确定位方法[158],缺点是仍无法反演磁矩信息。
随着磁梯度张量测量手段的进步,目前阶段以磁梯度张量测量为基础的单目标精准定位和反演方法得到了广泛关注和研究。磁梯度张量的优势为单一观测点信息量大、抗环境磁场干扰能力强,结合磁矢量和标量数据,拥有仅在单点就能快速实现任意目标位置和磁矩信息精确求解的应用潜力。2006年,日本东京大学的Takaaki Nara提出了欧拉反褶积用于磁性目标单点定位的经典理论[159],利用磁场矢量和磁梯度张量矩阵的欧拉反褶积公式来快速求解物体位置,该过程在理想环境中获得了近乎真实的目标位置,但实际问题是我们无法提取仅由目标源产生的磁矢量,这在未知场景下很难实现。目前较为成熟的磁梯度张量单目标定位方法,均是以Nara反褶积模型为基础进行的数据解释延伸,例如澳大利亚的Clark团队利用磁梯度张量的特征向量和归一化源强度实现了单测点单磁源精确反演[160];吉林大学的随阳轶团队利用磁梯度张量数据的球谐拓展函数和傅里叶变换快速确定目标磁偶极矩的方法[161];火箭军工程大学的李夕海教授团队提出一种基于磁梯度张量的磁性目标两点定位法[162],通过同步测量两个观测点的数据实现磁源定位和磁矩估计;陆军工程大学的李青竹博士提出的张量衍生不变关系定位法[163]和三阶磁张量欧拉反褶积定位法[164]均是在Nara反褶积模型基础上,利用磁梯度张量系统在单点处测得的二阶或三阶张量矩阵信息、磁矢量信息等实现目标的精准定位和磁矩反演。
这些方法仅利用单一测量点的磁测数据就能实现孤立源的定位和磁矩估计,又称为单点定位方法。特别地,通过磁梯度张量系统进行航线连续测量[163-164],对测区内孤立磁源具有较高的单点定位精度。然而,当多个目标出现在不同埋深,且其分布位置、形状和磁矩均不相同时,磁场数据因多个磁异常场源相互叠加,弱磁性目标常被强磁异常场淹没,这使得仅利用单点定位方法进行磁源定位和反演陷入瓶颈。
军事行动中,常需要判断一片未知区域内是否存在磁性目标;若存在目标,目标数目是多少;多个目标的分布区域和精确坐标是多少;多目标源中是否有符合磁矩条件的靶目标;等等。例如,在靶场或战场清理未爆弹时,对特殊弹体的识别和定位,水下多目标源的识别和反演,精密设备内部金属的多点位同步无损检测等。
这些应用场景的本质是对区域内多磁源的数目、分布、位置和磁矩信息的同步求解问题,即多磁性目标定位问题。多磁性目标定位方法常以单目标定位方法为基础进行扩展和改进,关键问题是解决多个目标间的磁异常场叠加造成磁矢量场紊乱,进而导致目标位置求解出现较大误差。目前,针对多磁性目标定位技术研究仍处于起步阶段。1993年,美国学者Hansen提出利用Werner反褶积方法对多磁性目标进行二维反演[165],这是公开报道的关于多磁性目标定位研究的最早记录;2005年,Hansen又将多源Werner反褶积方法拓展到了三维并进行了盆地复杂数据测量[166]。Hansen方法的主要缺点是需要在实际计算之前定义磁性目标的数量,可实际应用中目标数目是很难提前知晓的。近年来,中国地质调查局自然资源航空物探遥感中心王林飞团队通过归一化磁场垂向导数与z方向解析信号的比值得到磁梯度张量解析信号来识别目标最佳范围和深度[167];陆军工程大学李金朋提出利用归一化磁源强度和同质性方程对测区平面进行边界识别[168],实现平面下方目标位置和埋深估计。然而,王林飞团队和李金朋的方法需要人为鉴别等高线阈值图以确定目标的水平分布和数目,探测效率低、虚警率高且易受噪声影响。
可见,需要对测区内目标数进行自适应识别以适应更成熟的定位算法并提高定位精度。Ugalde曾使用核密度分布算法过滤不相关目标位置解[169],通过模糊C均值(Fuzzy C-Means,FCM)聚类算法的聚类质心来估计异常源的地质分布和走向,这种解决方法可为磁偶极子的多目标检测和识别提供思路;然而,经典FCM聚类算法需要预设初始聚类质心数目,但仅靠经验法则预设数目无法保证FCM聚类算法收敛到最优解。此后,Ren提出一种自适应模糊C均值(Adaptive Fuzzy C-Means,AFCM)聚类算法[170],通过修改评价聚类有效性函数(Clustering Validity Function,CVF)和试错迭代来确定最优聚类数;Yin提出另一种AFCM算法[171],通过将目标中心坐标与估计的聚类质心近似来捕捉多个未爆弹目标;Zhou使用k-means算法对欧拉反褶积定位点进行聚类[172],并取得了一定的效果。
在一篇不被关注的论文中,Helbig提出了一些积分关系式[173],用于从磁场估计局部磁源体(或多个体)的磁矩分量和总磁化方向(剩磁和感应磁化的矢量和)。1998年,Schmidt和Clark重新发现了Helbig积分[174],并主张通过对总磁场数据应用傅里叶变换方法将其付诸实践。2005年,Phillips应用Helbig积分,通过测量和计算得到的磁矢量分量估计矿体、未爆弹和废弃井等多个致密源的水平位置和总磁化方向[175],但仍未能解决磁异常源场叠加造成的目标反演失真问题。目前,将Helbig积分应用于磁梯度张量探测的相关研究鲜有报道,然而,磁梯度张量随磁源的距离增加而衰减比磁矢量快一个数量级[160],磁源上方的张量场变化可以认为仅由该磁源产生,因此,Helbig积分在磁梯度张量场的拓展有望激发其在多目标定位中的应用潜力。
此外,Davis开发了一种基于希尔伯特变换的扩展欧拉反褶积方法[176],用于多个未爆弹目标的自动检测,使用不同滑动窗口内的反演结果来估计目标位置,这种窗口划分方法可为目标分布区域预识别和提高多目标检测精度提供思路;宋霜等人提出的基于磁跟踪系统的多目标定位和识别方法[177],利用磁传感器阵列构建和Levenberg-Marquardt算法实时估计多个磁体位置和方向信息,也为解决多磁性目标定位问题提供了另一种思路。
磁性目标识别是磁异常目标探测领域的一个重要分支[178]。经典磁性目标识别方法是利用磁测信号的二维网格数据,绘制表示磁性物体边界信息的特征量(如归一化源强度[160]、磁倾斜角[179]等)等高线图,从而识别出这些物体的数量、二维分布、边界和形状等信息,或是通过计算目标磁矩信息来识别目标位姿或状态。例如,陆军工程大学的尹刚等人基于磁梯度张量和改进倾斜角进行了目标区域识别实验[178],获得了满意的识别结果;此后,该团队又提出了一种特征值边缘检测的方法用于识别磁性目标边界信息[180]。然而,这些方法需要针对目标的磁张量场进行复杂和大量的数学计算,该过程非常容易受到环境中的磁干扰和采集设备的噪声的影响。而且,传统目标识别方法大多仍属于磁性目标正反演计算范畴,由于磁场测量数据的不稳定性和易受误差影响,识别精度往往受到限制。如何跳过庞大、烦琐的计算过程,通过一些测量介质直接快速识别目标类型、姿态等关键信息,是目前亟待解决的问题。
磁性目标识别的前提是有效提取目标磁信号特征信息。根据磁场测量设备的采集方式差异,磁测信号大致可分为两种:按照某固定采样率进行连续采样的一维时间序列信号;按照划分的观测点进行单次采样的二维网格离散信号。而针对磁性目标磁信号特征信息的提取,可以分为特征属性变量发掘和属性信号特征提取两部分。
(1)特征属性变量发掘
通过研究表征磁性目标物性状态特征的一系列磁场属性变量,为目标识别的特征提取提供原始数据支持。例如磁梯度张量的9个分量[13]、张量矩阵特征值[160]、总磁场强度(Total Magnetic Intensity,TMI)[24]、幅值磁异常(Magnitude Magnetic Anomalies,MMA)[181]、归一化磁源强度(Normalized Source Strength,NSS)[182]、张量解析信号模(Analytic Signals Amplitude,ASA)[183]、张量不变量[184]等。其中,一些常见磁梯度张量不变量有张量矩阵的迹、特征方程系数、Frobenius范数、缩并张量(Contracted Tensor,CT)等[159,182]。例如,2006年,Clark团队分析了张量不变量I0、I1和I2的性质[182,184],表明I1的分辨率高于ASA,而I2对埋深较浅的磁源体的识别效果较好。目前,已发掘了一批新的用于描述磁性目标物性状态的磁梯度张量衍生变量,如特征边缘检测值[180]、改进倾斜角[178-179]等。
(2)属性信号特征提取
对于连续采样的各种磁特征属性值一维时间序列信号,可利用时域特征提取方法对磁信号波形进行分析处理,通过对信号进行数学统计分析,计算信号统计波形特征参数,从而提取磁性目标的特征信息。目前应用较多的时域统计特征参数主要包括峰值、峰峰值、均值、方差、均方根值、裕度、峭度、偏度、波形因子、峰值因子、脉冲因子、偏态指标和裕度指标等[185]。这些时域信息特征参数拥有计算简单高效、可视化程度高、可操作性强等优势,但由于其易受噪声和误差影响,对测量仪器的校准精度和降噪水平提出了较高要求。对于二维网格离散信号,目前可通过二维图像处理的方法对地球物理数据进行分析和研究。与一维信号相比,二维图像中包含更立体和清晰的磁源特征信息,但是二维离散信号对观测点的精准要求使数据采集和观测过程变得十分困难。目前应用较多的二维离散信号的图像特征参数包括灰度统计特征、边缘纹理特征和区域形状特征等[186]。
传统识别方法主要通过大量解析计算获得磁性目标二维边界、三维姿态和空间位置信息来识别物体物性状态,这种识别方法无法脱离磁测数据正反演运算过程,工程计算量大、受误差影响程度高、对测量设备精度要求严格。相较于传统识别方法,模式识别(Pattern Recognition,PR)[187]作为机器学习等人工智能应用中的重要方法发展迅速,已广泛应用于文本识别(如验证图、车牌号识别)、生物识别(如人脸、指纹识别)、遥感航测和医学检测等领域。目前,基于神经网络、支持向量机(Support Vector Machine,SVM)、极限学习机(Extreme Learning Machine,ELM)[188]等的机器学习算法在磁性目标探测领域无疑具有巨大的研究价值和发展潜力。
作为地球物理勘探领域模式识别的初期探索,早在1987年,美国学者Snydsman就指出图像处理和模式识别技术可以用于地下构造的分类识别和岩性描述[189];1991年,CSIRO的Raiche证明了利用神经网络的自适应模式识别(Adaptive Pattern Recognition,APR)方法进行地球物理数据反演计划的可行性[190];1997年,Rosati利用灰度空间依赖矩阵的图像纹理特征提取方法成功将统计模式识别技术应用于地球物理信号图像中[191],结果表明其可以增强磁异常检测的识别精度;2000年,Carlos描述了一项关于神经网络适用于地球物理反演问题的研究[192],通过垂直电测深(Vertical Electrical Sounding,VES)数据训练前馈神经网络(Feedforward Neural Network,FNN)来预测地球物理模型;2006年,美国汉诺威达特茅斯学院的Pablo以张量元素作为目标识别特征量[193],通过训练SVM识别类似磁偶极子的金属目标;2010年,美国密西西比州立大学的Turlapaty利用卫星遥感数据与相对稀疏的地面测量值进行比较[194],提出了一种基于小波特征提取和SVM的地球物理数据模式识别方法,同年德国莱布尼兹应用地球物理研究所的Ehret使用人工神经网络(Artificial Neural Network,ANN)和SVM从探地雷达法(Ground Penetrating Radar,GPR)数据中研究了岩石的分类[195];2015年,沙特阿拉伯Al-Garni使用神经网络方法解释了堤坝倾角引起的磁异常[196],并在实测中得到了较好的识别率。这些研究表明,模式识别方法适用于地磁探测领域,且一些国外研究机构已经积累了一定的工程应用实践经验。
国内对于磁性目标的模式识别研究起步较晚但发展迅速。2012年,中国地质大学姚长利教授团队尝试建立磁异常目标模板库来识别局部磁异常物体[197],获得了较好的计算机仿真识别结果,虽然缺乏实际工程验证但为磁异常体的识别提供了思路;2019年,中国地震局的李昌珑提出了地震灾害损失风险的三维图像模式识别方法[198];2020年,陆军工程大学的郑建拥提出了利用奇异值分解提取磁异常特征[199],并利用SVM进行目标分类,该团队还利用二维信号分解和HOG特征提取方法[186]对柱面和圆盘两种铁磁性目标进行了分类;同年,吉林大学地质勘探仪器实验室团队提出利用Mask-RCNN算法检测浅层地下磁性目标的形状[200]。这些方法的共性问题是需要利用磁梯度张量系统严格地测量二维网格磁场数据,测量难度大、采集流程复杂、数据量不足等,这为磁性目标模式识别方法的训练样本学习和获取带来困难。
模式识别方法的最新研究成果已在故障诊断和人工智能方面得到了重要应用[201],这些方法也有望在磁性目标的特征分类和识别应用中发挥巨大作用。因此,需要重新考虑磁梯度张量系统的测量方式和数据采样类型,以获得实用性好、可操作性强、识别精度高、稳定可靠且适用于磁性目标探测的模式识别新思路、新方法。